บทที่ 3
กระบวนการศึกษา และดำเนินการ การรวบรวมข้อมูลเบื้องต้นที่เกี่ยวข้องกับการทำโครงการออกแบบงานประติมากรรมรูปลอยตัวด้วยเทคนิคงานจากชิ้นส่วนเครื่องยนต์ เพื่อประดับสนามเด็กเล่นโรงเรียนสาทิศอนุบาลจันทรเกษม ทำให้ทราบถึงข้อมูลต่างๆ ที่จำเป็นในการทำงาน ซึ่งผลงานทั้งหมดได้ผ่านการศึกษาค้นคว้า รวบรวมข้อมูล การพัฒนาแบบ และการสร้างผลงานต้นแบบจากข้อมูลที่ได้ค้นคว้า
วัตถุประสงค์ของการออกแบบ
ออกแบบงานประติมากรรมรูปลอยตัว ด้วยเทคนิคงานจากชิ้นส่วนเครื่องยนต์ เพื่อเป็นการประยุกต์จากตัวหุ่นรูปลอยตัว มาเป็นหุ่นรูปแบบรูปลักษณะของงานประติมากรรมรูปลอยตัวที่อยู่บนแทนวางหุ่นสำหรับเอาไว้ประดับสนามเด็กเล่นได้ และภายใต้ของหุ่นแต่ละด้านให้แก่ผู้ที่สนใจที่จะนำความรู้หรือความคิดที่ได้จากการชมนำไปดัดแปลงเป็นอาชีพในอนาคตได้
แรงบันดาลใจ
เนื่องจากปัจจุบันนี้คนเราไม่รู้จักรคุณค่าของสิ่งของจึงใช้สอยกันอย่างฟุ่มเฟือยโดยไม่ได้คิดว่าสิ่งของใดที่สามารถนำกลับมาใช้ได้อีกดังนั้นตัวผู้ศึกษาจึงได้คิดค้นงานชิ้นนี้ขึ้นมาเพื่อเป็นอุทาหรให้กับเยาว์ชน ดังนั้นตัวผู้ศึกษาจึงคิดว่า ต้องการที่จะทำงานออกแบบงานประติมากรรมรูปลอยตัว ด้วยเทคนิคงานจากชิ้นส่วนเครื่องยนต์ของหุ่นแต่ละด้าน เพื่อประดับสนามเด็กเล่นโรงเรียนสาทิศอนุบาลจันทรเกษม เพื่อเป็นการประยุคต์จากตัวหุ่นแบบลอยตัว มาเป็นรูปงานประติมากรรมรูปลอยตัวที่อยู่บนแท่นวาง เพื่อประดับในสนามเด็กเล่นโรงเรียนสาทิศอนุบาลจันทร เกษม ดังนั้นตัวผู้ศึกษาจึงหวังว่า งานออกแบบงานประติมากรรมรูปลอยตัว ด้วยเทคนิคงานจากชิ้นส่วนเครื่องยนต์ หน้าจะเป็นประโยชน์แก่ผู้ที่ให้ความสนใจในงานชิ้นนี้ไม่มากก็น้อย
ขั้นตอนการศึกษา
1. การศึกษาข้อมูลจากเอกสาร
2. การศึกษาจากตัวอย่างกรณีศึกษา
3. แบบร่างและแบบร่างที่พัฒนาแล้ว
4. ความคิดสร้างสรรค์
5. การผลิตผลงานจริง
6. ผลงานที่เสร็จสมบรูณ์
ขั้นตอนที่ 1 การศึกษาข้อมูลจากเอกสาร
แหล่งศึกษาข้อมูลจากเอกสาร
- หอสมุดกลาง มหาวิทยาลัยศิลปกร
- ศูนย์ประติมากรรมกรุงเทพฯ
ในที่นี้เมื่อได้ศึกษาค้นคว้าข้อมูลต่างๆ ที่เกี่ยวกับงานประติมากรรมรูปลอยตัว ด้วยเทคนิคงานเชื่อมจากชิ้นส่วนเครื่องยนต์ จึงนำข้อมูลที่ได้มาวิเคราะห์ เพื่อเป็นแนวทางในการออกแบบ
ขั้นตอนที่ 2
การศึกษาจากตัวอย่างกรณีศึกษาการศึกษากรณีตัวอย่างจาก งานประติมากรรมลอยตัวรูปเหมือนจริง จากงานตัวอย่างที่ศึกษาค้นคว้าเพื่อศึกษาถึง ข้อดี และ ข้อเสียต่างๆ และนำมาประยุกต์ใช้เป็นแนวทางในการอกกแบบ งานประติมากรรมรูปลอยตัว ดัวยเทคนิคงาน เชื่อมจาก ชิ้นส่วนเครื่องยนต์ เพื่อประดับสนามเด็กเล่นโรงเรียนสาธิตอนุบาลจันทรเกษม
แบบที่ 1
วิเคราะห์แบบ
แบบที่ 2
วิเคราะห์แบบ
แบบที่ 3
วิเคราะห์แบบ
ขั้นตอนที่ 3 แบบร่าง และแบบร่างที่พัฒนาแล้ว
ในขั้นตอนนี้จากการที่ผู้ศึกษากรณีตัวอย่างจาก งานโชว์หุ่นยนต์แบบรูปลักษณะลอยตัว ผู้ศึกษาจึงได้นำกรณีตัวอย่างที่ได้ศึกษามาประยุกต์ เพื่อเป็นการออกแบบ แบบร่างงานประติมากรรมหุ่นยนต์รูปลอยตัว ด้วยเทคนิคงานเชื่อมจาก ชิ้นส่วนเครื่องยนต์ เพื่อประดับสนามเด็กเล่นโรงเรียนสาธิตอนุบาลจันทรเกษม ซึ่งมีทั้งหมด 3 ด้านด้วยกัน มีดังต่อไปนี้
แบบที่ 1.
เป็นงานประติมากรรมหุ่นยนต์รูปลอยตัว ด้วยเทคนิคงานเชื่อม จากชิ้นส่วนเครื่องยนต์ ทำโดยการใช้เทคนิคในการนำอะไหล่ของรถมอเตอร์ไซด์ มาเชื่อมต่อกันให้เป็นรูปร่างหุ่นยนต์ยืนในลักษณะ ขาซ้ายก้าวมาด้านหน้า โดยเริ่มต้นเชื่อมจากช่วงตัวหุ่นก่อนและขา 2 ข้าง เชื่อมลักษณะท่ายืนแล้วเชื่อมแขนข้าง ซ้าย ขวา ต่อมาเป็นส่วนหัว หัวสามารถถอดได้ หมุนได้ โดยใช้วิธีขันน๊อต เพื่อเอาไว้สำหรับ ถอดเข้า ถอดออก ได้ และ แขนจะทำในลักษณะเคลื่อนไหวได้ แขนทั้งสองข้างสามารถยกขึ้นลงได้

ภาพที่ 4 แบบร่างด้านหน้า
ที่มา : เกรียงไกร จารีต
วิเคราะห์แบบ
- ชิ้นงานโครงสร้างหุ่นยนต์ประยุกต์มาจากหุ่นยนต์แบบลอยตัว นำมาอกกแบบประยุกต์ใหม่ ให้เป็นบบงานประติมากรรมรูปลอยตัว
- ชิ้นงานประติมากรรมหุ่นยนต์เป็นสีดำด้าน มีใบหน้าของหุ่นยนต์ มีดวงตาเป็นน๊อตสี ส่วนใบหูสามารถพับเข้า พับออกได้ แขนสามรถ ยกขึ้นมาเป็นท่าไหว้แบบไทยๆ เพื่อความเป็นเอกลักษณ์ของตัวหุ่นยนต์แบบไทยๆ
แบบที่ 2
เป็นงานประติมากรรมหุ่นยนต์รูปลอยตัว ด้วยเทคนิคงานเชื่อม จากชิ้นส่วนเครื่องยนต์ ทำโดยการใช้เทคนิคในการนำอะไหล่ของรถมอเตอร์ไซด์ มาเชื่อมต่อกันให้เป็นรูปร่างหุ่นยนต์ยืนในลักษณะ ขาซ้ายก้าวมาด้านหน้า โดยเริ่มต้นเชื่อมจากช่วงตัวหุ่นก่อนและขา 2 ข้าง เชื่อมลักษณะท่ายืนแล้วเชื่อมแขนข้าง ซ้าย ขวา ต่อมาเป็นส่วนหัว หัวสามารถถอดได้ หมุนได้ โดยใช้วิธีขันน๊อต เพื่อเอาไว้สำหรับ ถอดเข้า ถอดออก ได้ และ แขนจะทำในลักษณะเคลื่อนไหวได้ แขนทั้งสองข้างสามารถยกขึ้นลงได้

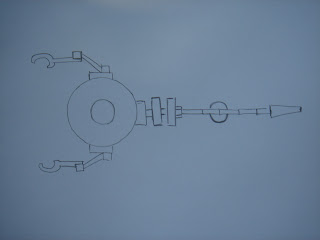
ภาพที่ 5 แบบร่างด้านข้าง
ที่มา : เกรียงไกร จารีต
วิเคราะห์แบบ
- ชิ้นงานโครงสร้างหุ่นยนต์ประยุกต์มาจากหุ่นยนต์แบบลอยตัว นำมาอกกแบบประยุกต์ใหม่ ให้เป็นบบงานประติมากรรมรูปลอยตัว
ลอยตัว
- ชิ้นงานประติมากรรมหุ่นยนต์เป็นสีดำด้าน โดยมองจากด้านข้างของตัวหุ่น ส่วนใบหูสามารถพับเข้า พับออกได้ แขนสามรถ ยกขึ้นมาเป็นท่าไหว้แบบไทยๆ ได้ ทำให้เกิดความเด่นชัดของหุ่นขึ้นมา เพื่อความเป็นเอกลักษณ์ของตัวหุ่นยนต์แบบไทยๆ
- ตัวหุ่นยนต์มีหางยื่นออกมา เพื่อเป็นเอกลักษณ์ และความสวยงาม ให้เกิด ความโดดเด่นของตัวหุ่นยนต์
แบบที่ 3
เป็นงานประติมากรรมหุ่นยนต์รูปลอยตัว ด้วยเทคนิคงานเชื่อม จากชิ้นส่วนเครื่องยนต์ ทำโดยการใช้เทคนิคในการนำอะไหล่ของรถมอเตอร์ไซด์ มาเชื่อมต่อกันให้เป็นรูปร่างหุ่นยนต์ยืนในลักษณะ ขาซ้ายก้าวมาด้านหน้า โดยเริ่มต้นเชื่อมจากช่วงตัวหุ่นก่อนและขา 2 ข้าง เชื่อมลักษณะท่ายืนแล้วเชื่อมแขนข้าง ซ้าย ขวา ต่อมาเป็นส่วนหัว หัวสามารถถอดได้ หมุนได้ โดยใช้วิธีขันน๊อต เพื่อเอาไว้สำหรับ ถอดเข้า ถอดออก ได้ และ แขนจะทำในลักษณะเคลื่อนไหวได้ แขนทั้งสองข้างสามารถยกขึ้นลงได้
ภาพที่ 6 แบบร่างด้านบน
ที่มา : เกรียงไกร จารีต
วิเคราะห์แบบ
- ชิ้นงานโครงสร้างหุ่นยนต์ประยุกต์มาจากหุ่นยนต์แบบลอยตัว นำมาอกกแบบประยุกต์ใหม่ ให้เป็นบบงานประติมากรรมรูปลอยตัว
- ชิ้นงานประติมากรรมหุ่นยนต์เป็นสีดำด้าน โดยมองจากด้านบนของตัวหุ่นยนต์ มีแขนยื่นออกมาจากตัวหุ่นยนต์ เ แขนสามรถ ยกขึ้นมาเป็นท่าไหว้แบบไทยๆ ได้ ทำให้เกิดความเด่นชัดของหุ่นขึ้นมา เพื่อความเป็นเอกลักษณ์ของตัวหุ่นยนต์แบบไทยๆ
- ตัวหุ่นยนต์มีหางยื่นออกมา เพื่อเป็นเอกลักษณ์ และความสวยงาม ให้เกิดความโดดเด่นของตัวหุ่นยนต์
แบบร่างที่พัฒนาแล้ว
ในขั้นตอนผู้ศึกษาได้พัฒนาแบบร่างงานประติมากรรมแบบลอยตัว ด้วยเทคนิคงานเชื่อมจากชิ้นส่วนเครื่องยนต์ เพื่อประดับสนามเด็กเล่น โรงเรียนสาธิตอนุบาลจันทรเกษม ซึ่งมีทั้งหมด 3 แบบด้วยกัน มีดังต่อไปนี้
แบบที่ 1
เป็นงานประติมากรรมหุ่นยนต์รูปลอยตัว ด้วยเทคนิคงานเชื่อม จากชิ้นส่วนเครื่องยนต์ ทำโดยการใช้เทคนิคในการนำอะไหล่ของรถมอเตอร์ไซด์ มาเชื่อมต่อกันให้เป็นรูปร่างหุ่นยนต์ยืนในลักษณะขาซ้ายก้าวมาด้านหน้าโดยเริ่มต้นเชื่อมจากช่วงตัวหุ่นก่อนและขา 2 ข้าง เชื่อมลักษณะท่ายืนแล้วเชื่อมแขนข้าง ซ้าย ขวา ต่อมาเป็นส่วนหัว หัวสามารถถอดได้ หมุนได้ โดยใช้วิธีขันน๊อต เพื่อเอาไว้สำหรับ ถอดเข้า ถอดออก ได้ และ แขนจะทำในลักษณะเคลื่อนไหวได้ แขนทั้งสองข้างสามารถยกขึ้นลงได้



ภาพที่ 14,15,16 เครื่องมือที่ใช้สำหรับเชื่อมหุ่นยนต์
ที่มา : เกรียงไกร จารีต
เครื่องมือสำหรับเชื่อมหุ่นยนต์ มีดังต่อไปนี้ ตู้เชื่อมไฟฟ้า ลวดเชื่อมไฟฟ้า คีมสำหรับจับชิ้นงาน ค้อนสำหรับเคาะสเก็ตก้านเชื่อม เลื่อยเหล็ก ตลับเมตร ถุงมือ หน้ากากเพื่อป้องกันแสงเข้าตา

ภาพที่ 17 การเชื่อมตัวหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นจึงเริ่มทำการเชื่อมหุ่นยนต์ โดยนำชุดเกียร์มาเชื่อมให้ติดกับเรือนคลัทตามแบบที่ต้องการ เมื่อเชื่อมติดกัน แล้วก็เคาะสเก็ดออก
 ภาพที่ 18 การเชื่อมส่วนหางของหุ่นยนต์
ภาพที่ 18 การเชื่อมส่วนหางของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นนำสลักลูกสูบมาเชื่อมติดกับโซ่ราวลิ้น และต่อกันเพื่อเป็นส่วนหางของหุ่นยนต์เพื่อให้ได้ความยาวตามขนาดที่ออกแบบไว้
ภาพที่ 19 การเคาะสเก็ตของลวดเชื่อม
ที่มา : เกรียงไกร จารีต
ต่อมาเป็นการเคาะสเก็ตของลวดเชื่อมเพื่อจะดูว่าแนวเชื่อม ที่เชื่อมไปมีความพอดีหรือไม่ และเคาะสเก็ตทุกครั้งในขณะเชื่อมจุดทุกส่วนของหุ่นยนต์

ภาพที่ 20 การเชื่อมส่วนขาของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นนำก้านข้อเหวี่ยงมาเชื่อมติดกับเฟืองเกียร์เพื่อต่อเป็นส่วนขาของ หุ่นยนต์ตามแบบที่ออกแบไว้

ภาพที่ 21 การเชื่อมต่อระหว่างส่วนหางกับตัวหุ่นยนต์
ที่มา : เกรียงไกร จารีต
เป็นการเชื่อมต่อระหว่างส่วนหางกับตัวหุ่นยนต์ เพื่อให้มีความแข็งแรงขึ้นกว่าเดิม

ภาพที่ 22 การเชื่อมส่วนแขนของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นนำก้านข้อเหวี่ยงมาเชื่อมติดกับก้ามปูเกียร์ เพื่อที่จะนำมาทำเป็นส่วนแขนของหุ่น

ภาพที่ 23 การเชื่อมตัวหนังสือคำว่า สวัสดีเมืองไทย
ที่มา : เกรียงไกร จารีต
ต่อมาเป็นการเชื่อมตัวหนังสือคำว่า สวัสดีเมืองไทย ให้ติดกับตัวหุ่นยนต์

ภาพที่ 25 การเชื่อมส่วนหัว ของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ต่อมาเป็นการเชื่อมส่วนหัว ของหุ่นยนต์ จะเชื่อมส่วนที่เป็นเส้นผม และใบหู จมูก ปาก ของหุ่นยนต์ตามแบบที่ต้องการ

ภาพที่ 26 การประกอบหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ต่อมาเป็นขั้นตอนการประกอบหุ่นยนต์ นำปิ่นล็อคมาล็อคชุดเกียร์ชิ้นที่ 1 เพื่อไม่ให้เฟืองเกียร์ขยับขึ้นลงได้แต่สามารถหมุนได้ ส่วนนี้เป็นส่วน คอ ของหุ่นยนต์

ภาพที่ 28 การประกอบเฟืองเกียร์
ที่มา : เกรียงไกร จารีต
ต่อมาเนำเฟืองเกียร์ชิ้นที่ 2 หรือชิ้นสุดท้ายมาประกอบตามแบบที่ที่ได้ออกแบบไว้

ภาพที่ 30 การยึดน๊อตแขนหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นนำน๊อตสีเบอร์ 10 มายึดที่ไหล่หุ่นยนต์

ภาพที่ 31 การขันน๊อต
ที่มา : เกรียงไกร จารีต
ขันน๊อตพอประมาณ เพื่อให้แขนสามารถขยับขึ้นลงได้ตามที่ออกแบบไว้

ภาพที่ 32 การประกอบส่วนหัวของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ต่อมานำส่วนหัวของหุ่นยนต์มาประกอบ

ภาพที่ 33 ดูความแข็งแรงของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ขยับซ่ายไปมา เพื่อดูว่าแข็งแรงหรือไม่

ภาพที่ 34 ประกอบดวงตาหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ต่อมานำน๊อตสีเบอร์ 10 มาประกอบเป็นดวงตาหุ่นยนต์ เพื่อให้เกิดความสวยงาม และ ขันให้แน่น

ภาพที่ 35 ดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
จากนั้นตรวจดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์มุมด้านซ้าย

ภาพที่ 36 ดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์
ที่มา : เกรียงไกร จารีต
ตรวจดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์มุมด้านขวา

ภาพที่ 37 ตรวจดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์ ขั้นสุดท้าย
ที่มา : เกรียงไกร จารีต
ขั้นสุดท้าย ตรวจดูความเรียบร้อยบริเวณส่วนหัวของหุ่นยนต์ มุมด้านหน้า และทุกส่วนของหุ่นยนต์ เป็นอันเสร็จกระบวนการการผลิตหุ่นยนต์ ได้ผลงานที่เสร็จสมบูรณ์

ภาพที่ 38 ผลงานสำเร็จแบบที่ 1
ที่มา : เกรียงไกร จารีต
 ภาพที่ 39 ผลงานสำเร็จแบบที่ 2
ภาพที่ 39 ผลงานสำเร็จแบบที่ 2
ที่มา : เกรียงไกร จารีต  ภาพที่ 40 ผลงานสำเร็จแบบที่ 3
ภาพที่ 40 ผลงานสำเร็จแบบที่ 3
ที่มา : เกรียงไกร จารีต























































